
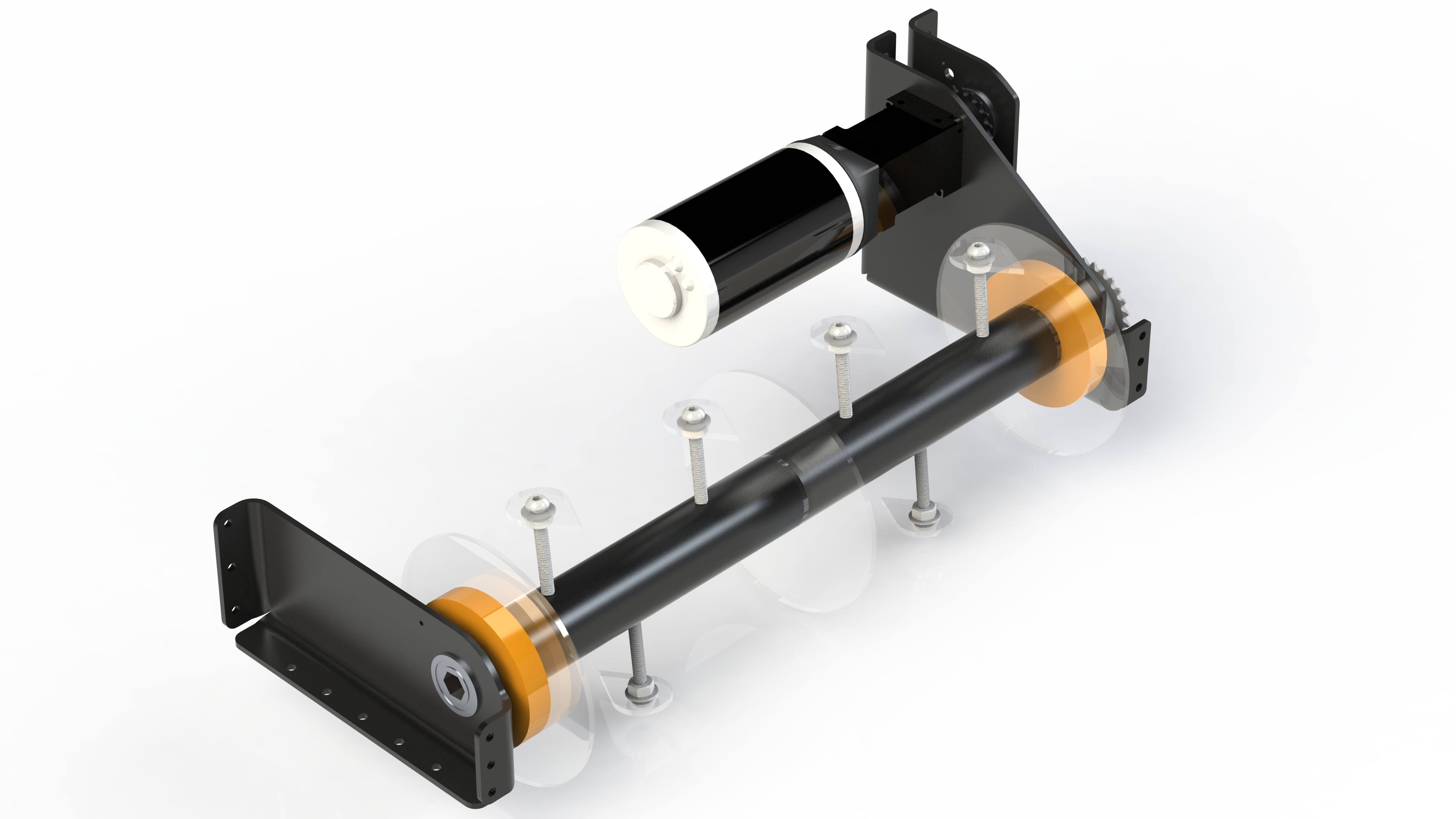
Our climber design consists of a drum and an array of hooks to catch the rope. The drum has a diameter of 1.5” and is 14.5” long. The length of the drum is to make lining up with the rope easier for the driver. The hooks that are used to catch the rope are made of ¼-20 bolts and polycarbonate plates. The climber is driven by a CIM at a 35:1 reduction using a Versaplanetary gearbox as well as a chain and sprocket reduction. This reduction optimizes the CIM motor by running it at peak power. Based on the torque need to lift a full weight robot, the reduction was chosen so that the torque required by the motor was the torque at peak power, giving us the fastest possible climb with one CIM motor. We placed the climber on the belly pan of the robot so it would be structurally sound and in a place where it can easily grab onto the rope without interfering with the function of other mechanisms.